Modbus TCP/IP Client¶
Requirements
- Modbus & OPC Edition or Ultimate Edition
This driver implements a Modbus TCP/IP Client (master).

Configuration¶
You can define from where to read digital values (Inputs or Coils) and register values (Input Registers or Holding Registers). You can't, however, change where to write values since a Modbus TCP/IP server only allows write operations on Coils and Holding Registers.
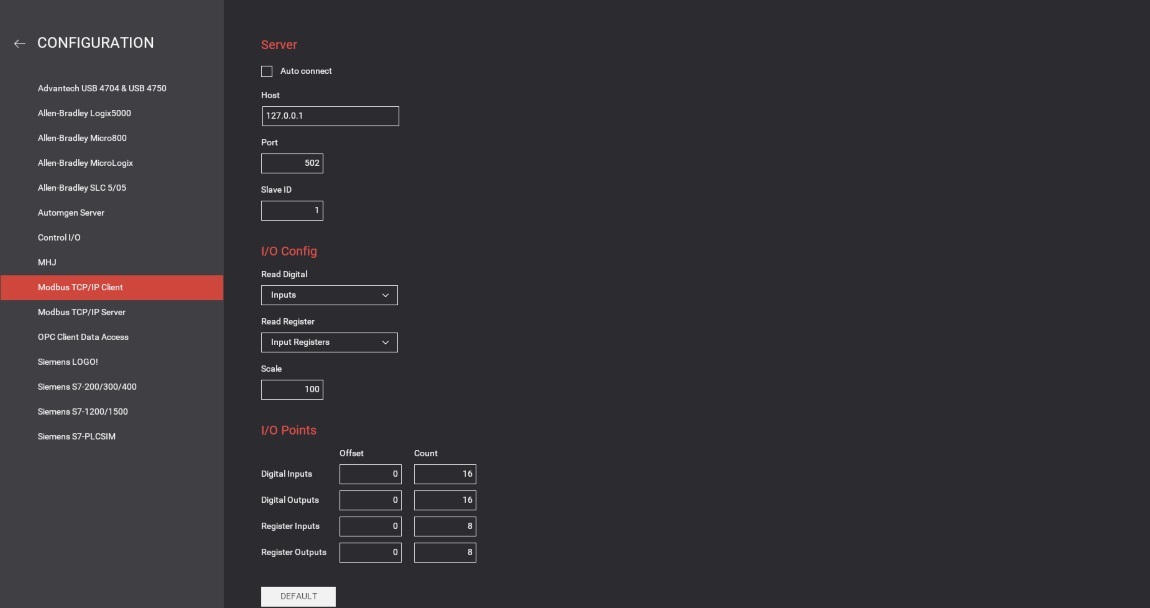
| Configuration Setting | Description |
|---|---|
| Auto connect | Periodically tries to connect to the PLC until a successful connection is established. |
| Host | Server IP address (127.0.0.1 for localhost). |
| Port | TCP port number (default is 502). |
| Slave ID | Slave ID. |
| Read Digital | From where to read Digital Inputs (Inputs or Coils). |
| Read Register | From where to read Registers (Input Registers or Holding Registers). |
| Scale | Floating sensor values are multiplied by this value; actuator values are divided by it. Using this approach, a floating sensor's value can be converted into an integer, sent to the client and converted back to a real number by dividing it by the scale factor (e.g. an input value of 3.14 with 100 as scale is sent as 314, then it can be divided by the same scale to obtain the real value of 3.14). |
| Digital Inputs | Address offset and number of Coils to use (max 256). |
| Digital Outputs | Address offset and number of Digital Inputs or Coils to use (max 256) - (select one option from the Read Digital list). |
| Register Inputs | Address offset and number of Holding Registers to use (max 64). |
| Register Outputs | Address offset and number of Input Registers or Holding Registers to use (max 64) - (select one option from the Read Register list). |
| Default | Click to reset to the default options. |